YoloV8 문서 따라해보기 -Segmentation
목차
-
- [기본 환경 세팅]
-
- [Pose 데이터 활용해보기]
0. 가상환경 키기
가상 환경 만들기 conda create -n yolov8_segmentation python=3.10 conda activate yolov8_segmentation
- 참고 콘다 업데이트 conda update -n base -c defaults conda
가상 환경 삭제 명령어 conda env remove -n yolov8_segmentation —
conda activate yolov8_custom
이전 포스팅을 참고하여 이미 설치된 가상환경을 활성화 해줍니다.
1.Pose 데이터 활용해보기
- 기본 스크립트 ```python from ultralytics import YOLO
Load a model
model = YOLO(‘yolov8n-pose.pt’) # load an official model
Predict with the model
results = model(‘https://ultralytics.com/images/bus.jpg’) # predict on an image
python 스크립트만 입력해줘도 모델이 없으면 찾아서 업데이트 작업 진행해주고 참 좋은 기능이다.
다만 해당 기본 스크립트는 결과 파일을 보여주지 않기 떄문에 조금에 수정을 해준다
2. 결과 영상 출력하기
```python
from ultralytics import YOLO
import cv2
# Load a model
model = YOLO('yolov8n-pose.pt') # load an official model
# Predict with the model
model.predict(source = 'https://ultralytics.com/images/bus.jpg', show = True, save=True)
cv2.waitKey(0)
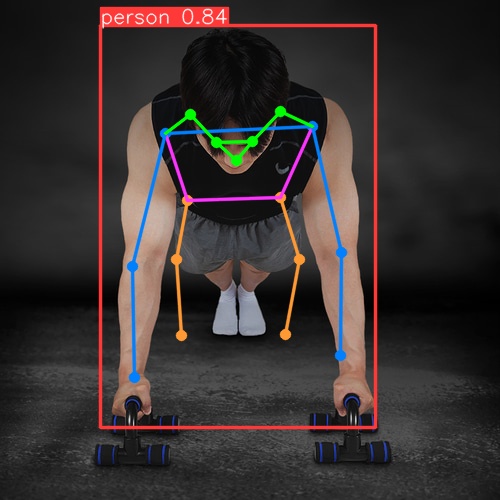
결과

- 개발 환경 목록
출처
- yoloV8 포즈 자세 https://docs.ultralytics.com/tasks/pose/#train
댓글남기기