[STM32] 2024-01-09-STM32 CAN 통신
개념정리
CAN 통신
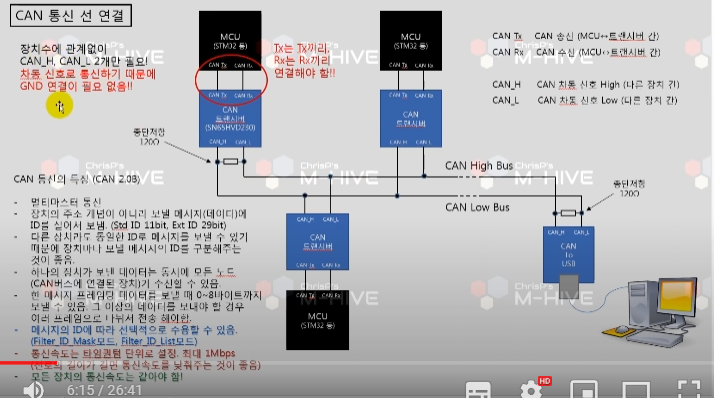
비통기식 멀티 마스터 비동기식 클럭 없이 통신하는 방식 멀티 마스터는 모든 장치가 마스터로 동작할 수 있다
보통 임베디드 시스템이나 범용 장비로 동작하는데 사용
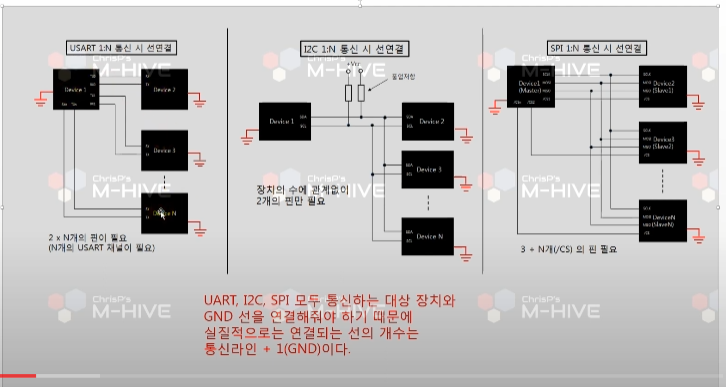
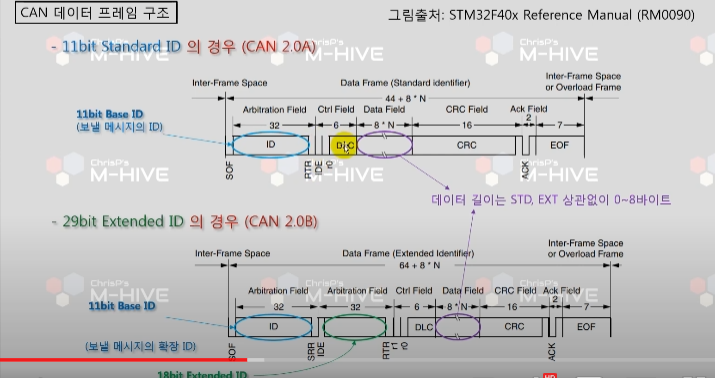
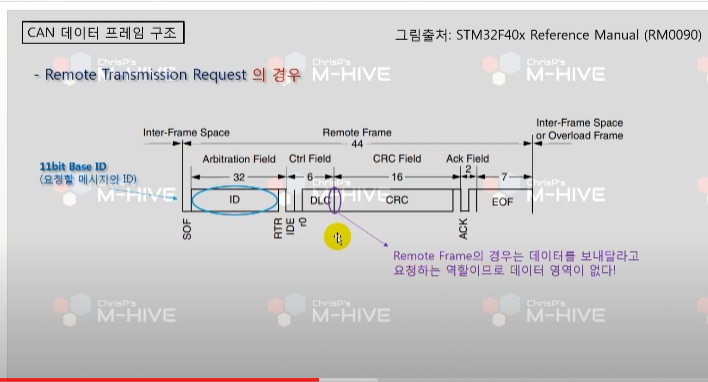
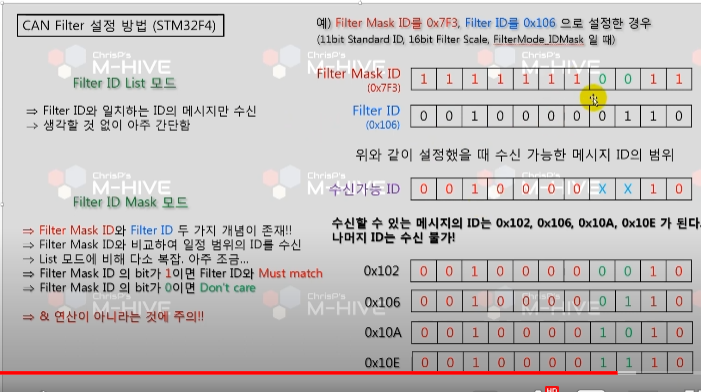
캔통신 특징 데이터를 보낼때 id 정보를 보낸다 id 필터를 통해서 정보를 수신할 수 있다.
여러개의 아이디를 사용해서 보낼수 있다.
개발 환경 세팅
세부설정
DMA 설정
소스코드
송신 예시
HAL_CAN_Start(&hcan1);
while(1)
{
cantxHeader.StdId = 0x102;
cantxHeader.RTR = CAN_RTR_DATA;
cantxHeader.IDE = CAN_ID_STD;
cantxHeader.DLC = 8;
for (int i=0;i<8;i++) cantxHeader[i]++;
TxmailBox = HAL_CANTxMailboxesFreeLevel(&hcan1);
HAL_CAN_ADDTxMessage(&hcan1, &canTxHeader, &canITx0Data[0], &TxMailBox);
}
출처
- 참고 영상강의 자료 https://www.youtube.com/watch?v=_7Ll95FITn4&list=PLUaCOzp6U-RqMo-QEJQOkVOl1Us8BNgXk&index=4&ab_channel=ChrisWonyeobPark
댓글남기기